Nils T Siebel
Evolutionary Reinforcement Learning
This page gives an overview of EANT, a method to learn neural networks by evolutionary reinforcement learning
Evolutionary Acquisition of Neural Topologies, Version 2 (EANT2)
Contents of this page
1 Motivation
When a neural network is to be developed for a given problem, two aspects need
to be considered:
- What should the structure (or, topology) of the network be?
More precisely, how many neural nodes does the network need in order to
fulfil the demands of the given task, and what connections should be made
between these nodes?
- Given the structure of the neural network, what are the optimal values
for its parameters? This includes the weights of the connections and
possibly other parameters.
Traditionally the solution to aspect 1, the network's structure,
is found by trial and error, or somehow determined beforehand using
"intuition". Finding the solution to aspect 2, its parameters, is
therefore the only aspect that is usually considered in the literature. It
requires optimisation in a parameter space that can have a very high
dimensionality—for difficult tasks it can be up to several hundred. This
so-called "curse of dimensionality" is a significant obstacle in machine
learning problems. When training a network's parameters by examples (e.g.
supervised learning) it means that the number of training examples needed
increases exponentially with the dimension of the parameter space. When using
other methods of determining the parameters (e.g. reinforcement learning, as
it is done here) the effects are different but equally detrimental. Most
approaches for determining the parameters use backpropagation or similar
methods that are, in effect, simple stochastic gradient descent optimisation
algorithms.
2 Our Approach: EANT
In our opinion, the traditional approach described above has the following
deficiencies:
- The common approach to pre-design the network structure is difficult or
even infeasible for complicated tasks. It can also result in overly complex
networks if the designer cannot find a small structure that solves the
task.
- Determining the network parameters by local optimisation algorithms like
gradient descent-type methods is impracticable for large problems. It is
known from mathematical optimisation theory that these algorithms tend to get
stuck in local minima. They only work well with very simple (e.g., convex)
target functions or if an approximate solution is known beforehand.
In short, these methods lack generality and can therefore only be used to
design neural networks for a small class of tasks. They are engineering-type
approaches; there is nothing wrong with that if one needs to solve only a
single, more or less constant problem (The No Free Lunch Theorem states
that solutions that are specifically designed for a particular task always
perform better at this task than more general methods. However, they perform
worse on most or all other tasks, or if the task changes.) but it makes
them unsatisfactory from a scientific point of view.
We believe that the best way to overcome these deficiencies is to replace these
approaches by more general ones that are inspired by biology. Evolutionary
theory tells us that the structure of the brain has been developed over
a long period of time, starting from simple structures and getting more complex
over time. The connections between biological neurons are modified by
experience, i.e. learned and refined over a much shorter time span.
We have developed a method called
EANT,
Evolutionary Acquisition
of Neural Topologies, that works in very much the same way to create a
neural network as a solution to a given task. It is a very general learning
algorithm that does not use any pre-defined knowledge of the task or the
required solution. Instead, EANT uses
evolutionary search methods on
two levels:
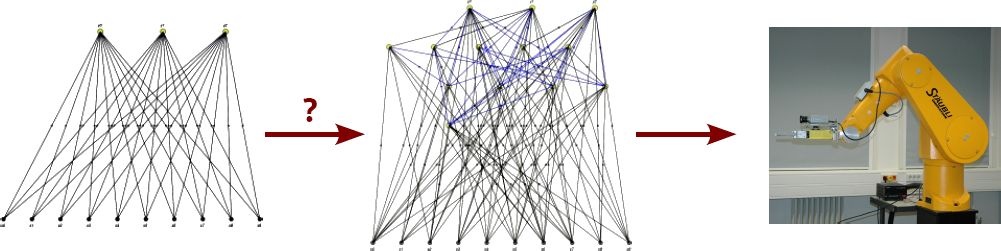
- In an outer optimisation loop called structural exploration new neural
structures are developed by gradually adding new structure to an initially
minimal network that is used as a starting point.
- In an inner optimisation loop called structural exploitation the
parameters of all currently considered structures are adjusted to
maximise the performance of the networks on the given task.
3 Applying EANT to Visual Servoing
EANT, originally developed by Yohannes Kassahun in the Cognitive Systems Group in Kiel
during the years 2003-2006, has since been improved by replacing the structural
exploitation loop by one that uses CMA-ES as its optimisation method, and by changing
the way structural changes are made.
Now it is in a state where it can, and has been, applied to very complex learning
problems. It is being further developed under the lead of Nils T Siebel in the same
research group.
The method has been tested with a simulation of a visual servoing setup. A robot
arm with an attached hand is to be controlled by the neural network to move to
a position where an object can be picked up. The only sensory data available
to the network is visual data from a camera that overlooks the scene. EANT was
used with a complete simulation of this visual servoing scenario to learn
networks by evolutionary reinforcement learning.
The results obtained with EANT were very good, with an EANT controller
of moderate size easily outperforming both traditional visual servoing and
other neural network learning approaches, even though the traditional controller
was given the true distance to the object in its Image Jacobian.
Author of these pages:
Nils T Siebel.
Last modified on Wed May 26 2010.
This page and all files in these subdirectories are Copyright © 2004-2010 Nils T Siebel, Berlin, Germany.